智慧服務型機器人 |
|||||||
|
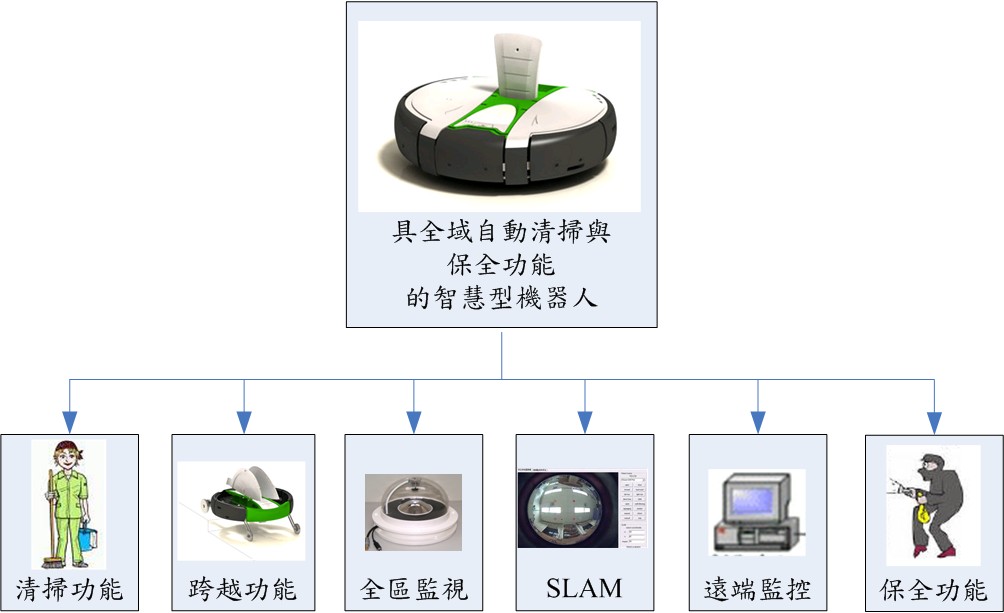
本研究係開發自主性具跨越功能之輪型居家清掃機器人,藉由可開展的輪臂設計,使其攀爬具有高架地板的室內環境,並研究其智慧型清掃路徑與策略,在設計創新與理論研究方面,於第十屆全國機構與機器設計學術研討會中獲得最佳論文獎,並已申請/獲得多項國際專利(美國發明專利12/884,160、中華民國發明專利I 311047),以及獲得多次全國性機器人比賽第一名的殊榮及2014年波蘭華沙發明展金牌獎。此項研發成果已與國內最大清掃機器人製造公司─松騰實業有限公司簽訂產學計畫進行專利授權與技術轉移,大幅提昇國內清掃機器人產業的競爭力。另一方面結合智慧清掃、遠端遙控與影像保全,成為一智慧型管家機器人,此項此項設計觀念也促使松騰開發出具保全與遠端監控的清掃機器人,大幅提昇國內清掃機器人產業的競爭力。另開發清掃機器人實境模擬系統,分析清掃機器人的覆蓋率與清掃效率,降低設計成本,並驗證智慧清掃邏輯控制,是項技術已與鴻奇機器人公司簽訂三件產學合作計畫,並合作開發具越障功能的清掃機器人商品化原型機,共同開發市場,降低技轉開發風險。近來開始拓展相關研究至戶外服務型機器人包括智慧剪草機器人、溫室有機栽種的除草機器人,結合影像辨識草皮邊界、雜草辨識、定位與環境地圖建置,進行自動化全域割草與局部除草,也投入自動海漂垃圾收集船的設計,進行港灣海漂垃圾辨識收集與自動停泊的整合研究。 1. 具跨越與遠端監控功能之智慧清掃機器人
(a). 障礙攀爬機構 ˙ 藉由輪臂式的攀爬機構與障礙攀偵測,使移動式機器人可自由地上下高架地板(如和室) 。 ˙ 清掃範圍不受到門檻和室台階的限制,順暢地完成室內環境清潔工作,更適於亞洲地區的居家環境,具市場創新價值。 ˙ 輪臂收合時機構成扁平狀,便於清掃家具底部。
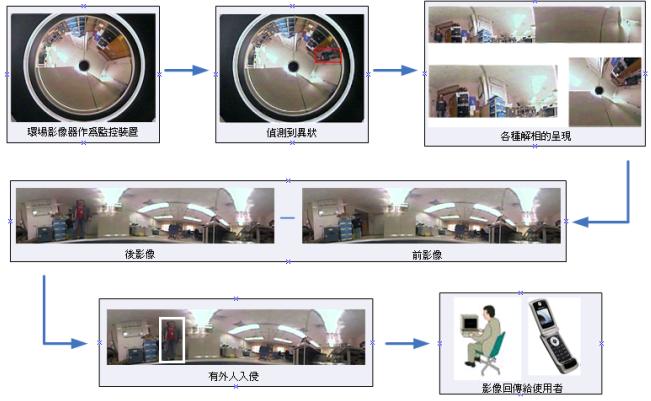
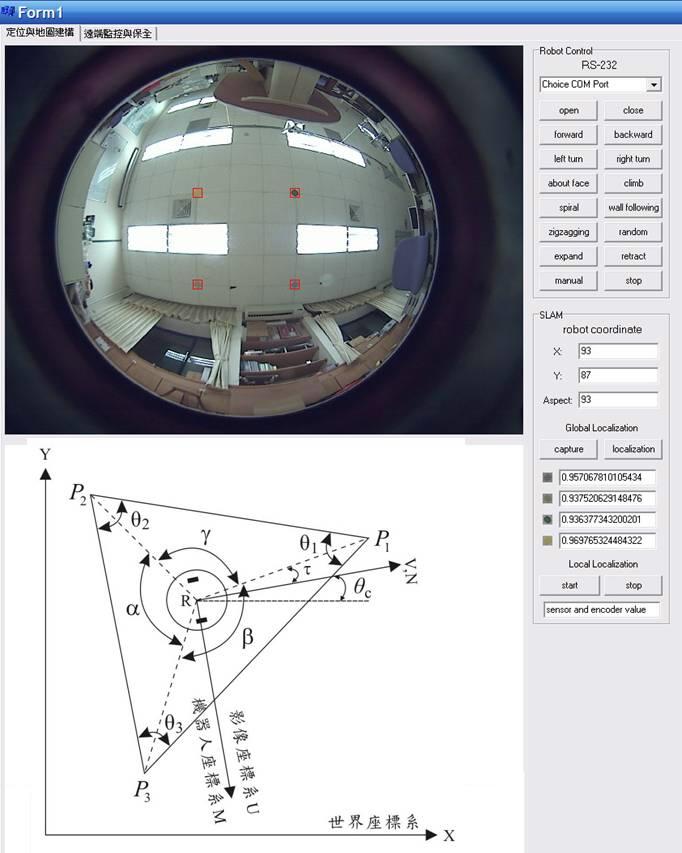
(b). 遠端監控與人機介面 ˙ 模組化運動指令 ˙ 無線影像傳輸,透過裝置於機器人上的360°環場影像器(Panoramic Camera),整合遠端監控與影像監視保全功能。
(c). 環境辨識與定位 ˙ 以驅動輪上編碼器估計局部機器人方位變化 ˙ 以影像辨識天花板路標,配合Resection technique做為機器人方位估計。 ˙ 循邊功能結合局部與影像全域定位功能建置環境邊界。
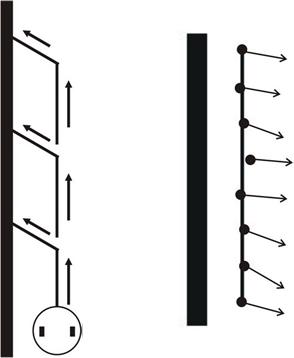
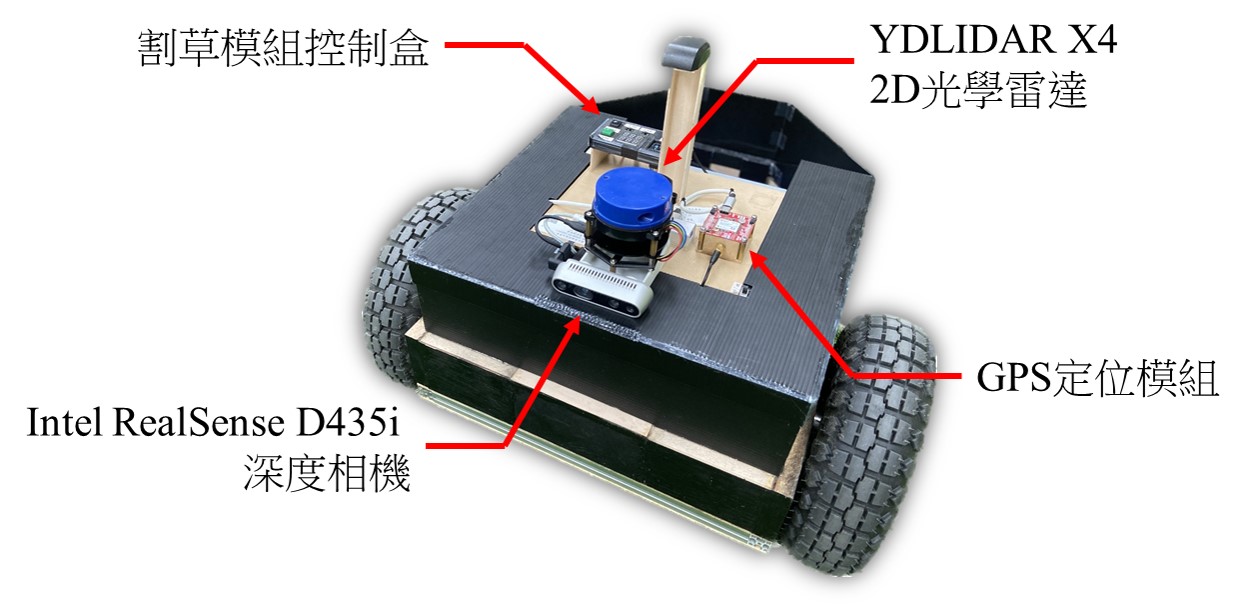
2. 智慧剪草機器人 ˙ 割草機器人的同步定位與地圖建置 ˙ 使用支援向量機(SVM)配合核影像掃描,自動檢測平坦的草坪邊界 ˙ 分層式成本地圖與導航
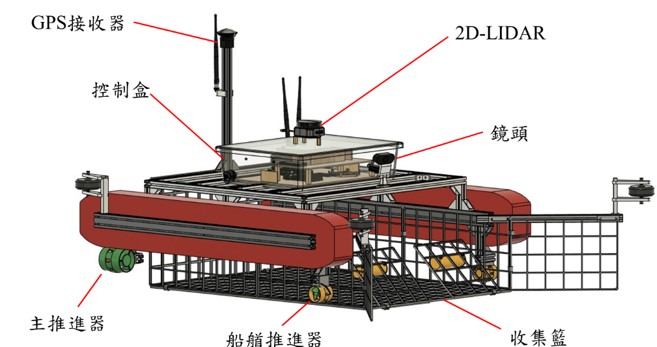
3. 自動海漂漂浮垃圾收集船 ˙ 水面漂浮垃圾辨識與追蹤 ˙ 自動返回停泊點的控制 ˙ UAV環境建圖協作應用
|
|||||||
|
相關研究成果:發表之期刊、研討會論文 相關研究計畫: (1) 自走式吸塵機越障與遠端監控功能的開發(松騰實業產學計畫97) (2) 具跨越與遠端監控功能之家用清掃機器人的開發(國科會產學計畫97) (3) 家用清潔機器人設計改善開發(經濟部智慧型機器人產業發展推動計畫— 協助業界產品開發與商品化輔導案99) (4) 智慧清掃控制結合區域地圖網絡於隨機為基吸塵機器人的全域覆蓋最佳化(MOST 105-106) (5) 應用影像視覺辨識於智慧割草機器人定位與路徑規劃(NSC 110-113) |
|||||||